 平台热线
平台热线



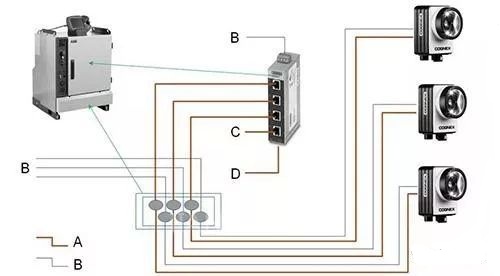
机器人与相机一般采用socket通讯(TCP/IP)。所以机器人需要有pc-interface选项。
机器人一般做client,在示教器-程序编辑器,添加指令-communicate下找到SocketCreate
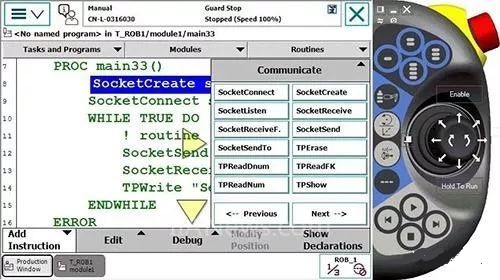
下图为机器人做client与相机通讯的一般步骤
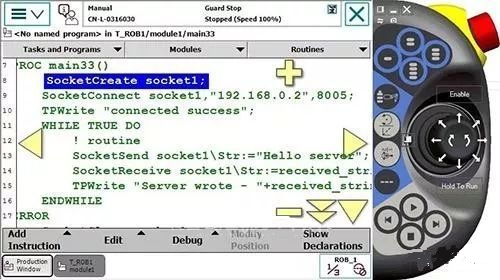

如果通讯成功,机器人就能收到相机发送过来的字符串,举例如下,即x偏量1.23,y偏量4.56,角度7.89。
了解更多咨询请点击关注:ABB机器人服务商
联系热线:18621160739 联系人:李红 联系地址:上海市黄埔区北京东路666号G区5层510室
技术和报价服务:星期一至星期六 8:00-22:00 ABB机器人服务商
